Admin
مدير المنتدى


عدد المساهمات : 18994
التقييم : 35488
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes السبت 14 نوفمبر 2020, 6:33 pm موضوع: بحث بعنوان Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes السبت 14 نوفمبر 2020, 6:33 pm | |
| 
أخوانى فى الله
أحضرت لكم
بحث بعنوان
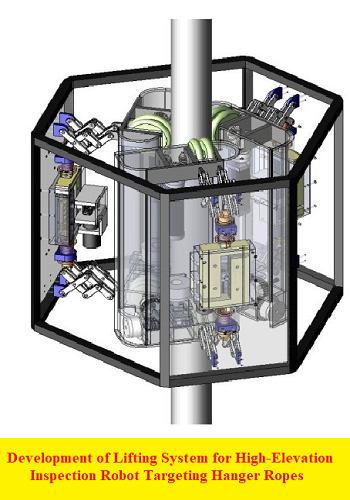
Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes
Yoshinori Fujihira, Naohiko Hanajima, Kentarou Kurashige, Hidekazu Kajiwara, and Masato Mizukami
Muroran Institute of Technology
و المحتوى كما يلي :
In this paper, we show the development of a lifting system and frame body for an inspection robot targeting
hanger ropes of a suspension bridge. Infrastructure
now requires regular inspection and such robots are
expected to be used in places where manual inspection
is difficult. The problems associated with the lifting
system for the hanger-rope inspection robot studied in
this paper include a long lifting distance (up to 100 m),
postural stability against the influence of wind, and
risk of falling. To solve these problems, we propose
a lifting system with an alternating rotation mechanism, which takes advantage of the lifting mechanism
of a climbing doll. In this paper, we explain the design
and control methods of the lifting mechanism and alternating rotation hoist to realize the proposed lifting
system. For the moving frame body, we designed and
made a mechanism and frame structure to maintain
stability of its posture. Performing an operation test in
our laboratory and in the field with the proposed system incorporated into an actual unit, we checked the
action of the proposed mechanism. In particular, we
could confirm in the field test that the postural stability necessary for shooting inspection images could be
ensured in an environment with wind speed of 5 m/s
and that ascending and descending motions could be
successfully performed with the current output of the
alternating rotation hoist, even in an environment with
a mean wind speed of 10 m/s.
Keywords: inspection robot, lifting mechanism, wire
driven, bridge inspection, hanger rope
Conclusions
In this study, we developed a new lifting mechanism
for a hanger-rope inspection robot and a frame body that
could maintain a stable posture. We proposed a new lifting mechanism using an alternating rotation hoist based
on a climbing doll principle and installed the mechanism
in the inspection robot. Experiments were performed in
laboratory and in the field to check operation of the robot.
Moreover, we calculated the torque necessary to wind a
rope under an estimated wind load and designed a speed
mechanism for the alternating rotation hoist. The rated
tension and maximum instantaneous tension of the rope,
T
rope and Trope max that the alternating rotation hoist could output were 1536 N and 4604 N, respectively. In the development of the frame body, we employed a frame structure
with wire trusses using aluminum square pipes and wires.
The frame body had a passive roller mechanism to maintain its posture and to move over the vibration suppression
braces. The posture stability was confirmed in the static
posture stability experiment and in the field experiment.
The field experiment was performed under the conditions in Table 2. Ascending and descending motions were
confirmed under every condition. In particular, we could
see ascending and descending motions even when the average wind speed was about 10 m/s. Namely, we confirmed that the developed lifting system could move up
and down even at our target wind speed of 10 m/s. The
posture stability experiment showed that the average tilting angle of the frame body was 1◦ or less and that the
maximum tilting angle was 7◦ or less. This indicates that
the system had sufficient postural stability to take inspection images.
In the future, it will be necessary to perform a lifting experiment for a higher band in order to check several more
requirements that are needed to use the robot for actual
inspection work. These requirements include whether the
proposed frame body can actually move over the vibration
suppression braces and whether the inspection robot can
move up to a much higher location in a stable way.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes
رابط مباشر لتنزيل بحث بعنوان Development of Lifting System for High-Elevation Inspection Robot Targeting Hanger Ropes 
|
|











