Admin
مدير المنتدى


عدد المساهمات : 18996
التقييم : 35494
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Analytical and Graphical Optimal Synthesis of Crank-Rocker Four Bar Mechanisms for Achieving Targeted Transmission Angle Deviations السبت 11 سبتمبر 2021, 12:31 am موضوع: بحث بعنوان Analytical and Graphical Optimal Synthesis of Crank-Rocker Four Bar Mechanisms for Achieving Targeted Transmission Angle Deviations السبت 11 سبتمبر 2021, 12:31 am | |
| 
أخواني في الله
أحضرت لكم كتاب
بحث بعنوان
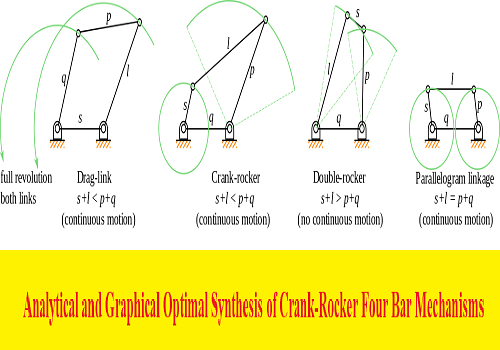
Analytical and Graphical Optimal Synthesis of Crank-Rocker Four Bar Mechanisms for Achieving Targeted Transmission Angle Deviations
Sabry El-Shakery, Rokaya Ramadan, Khaled Khader
Production Engineering and Mechanical Design Department, Faculty of Engineering, Menoufia University, Egypt
و المحتوى كما يلي :
Abstract
This paper presents a detailed methodology to optimally synthesize links' lengths of planar Crank-Rocker (C-R) mechanism
to achieve a targeted design with definite transmission angle deviation. Analytical and graphical proposed methodologies are
applied to three different case studies; each satisfies a definite case (task). The analytical methodology is based on deducing
six design equations with equality constraints, which represent relations between the desired case conditions and the
mechanism's lengths. Meanwhile, deflection and transmission angles; the time ratio limits or output angular stroke can be easily
obtained. Furthermore, optimal synthesized results can fulfil any definite case requirements which can be represented using the
corresponding six deduced equations. The optimal charts are presented to quickly obtain the optimal (C-R) mechanism's
lengths, which are achieving the targeted transmission angles deviations. Consequently, the designers can easily select optimal
synthesized crank-rocker mechanisms' lengths, instead of time consuming of optimization calculations. Also, this paper
presented a fast-graphical methodology to directly obtain an optimal synthesized (C-R) mechanism's lengths. This methodology
requires only identifying the design case related to the chosen mechanism class and the desired transmission angle deviations
through giving the minimum and maximum transmission angles (γmin and γmax). Moreover, a direct relation between the
mini-max transmission angle deviations, the (C-R) mechanisms classes and the performance parameters can be presented.
Hence, this facilitates the specialists' mission in designing (C-R) mechanisms for special uses as driving conveying, screening
and shaking mechanisms.
Conclusion
This work proposed a detailed analytical methodology
in addition to a fast-graphical methodology to optimally
synthesize lengths' proportions of planar crank-rocker
mechanism in order to accomplish targeted design with a
definite transmission angle deviation. The analytical
methodology deals with deducing six design equality
constraint equations that satisfy three case studies. The
discussion of the presented results reveals that the optimal
synthesized (C-R) mechanisms are classified into three
classes according to the three case studies for achieving
targeted definite transmission angle deviations. The direct
relation between the mini-max transmission angle
deviations and the (C-R) mechanisms classes in addition to
their six performance parameters are be presented.
If and only if the (C-R) mechanism's lengths verify the
desired case conditions, the six deduced design constraint
equality equations can be verified. The obtained optimal
results using the presented methodology are concurring
with those introduced in the previous literature using
different approaches.
On the other hand, the suggested graphical synthesis
methodology can be carried out to directly construct such
optimal (C-R) mechanism's lengths. This graphical method
is based on only choosing the design case related to the
selected class of (C-R) mechanism beside the desired
transmission angle deviations through giving the minimum
and the maximum transmission angles in order to achieve
an optimal synthesized crank-rocker mechanism's lengths.
The optimal charts are introduced to directly obtain the
optimal (C-R) mechanism's lengths, which are achieving the
targeted transmission angles deviations. Therefore, the
designer can easily select optimal synthesized crank-rocker
mechanisms' lengths which can be employed in several
industrial applications. These applications may include
using (C-R) mechanisms associated with a desired equal
deviation of mini-max transmission angle for achieving
vibrating motions in sieve conveyors. Also, these kinds of
mechanisms with time ratio greater than one can be used for
generating a required quick-return motion for shaper
machines and the mechanisms with time ratio less than one
can be used for generating a positive sliding stage of a conveyed mechanism and increasing the conveying capacity.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Analytical and Graphical Optimal Synthesis of Crank-Rocker Four Bar Mechanisms
رابط مباشر لتنزيل بحث بعنوان Analytical and Graphical Optimal Synthesis of Crank-Rocker Four Bar Mechanisms 
|
|











