Admin
مدير المنتدى


عدد المساهمات : 18996
التقييم : 35494
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints الثلاثاء 07 سبتمبر 2021, 2:01 am موضوع: بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints الثلاثاء 07 سبتمبر 2021, 2:01 am | |
| 
أخواني في الله
أحضرت لكم
بحث بعنوان
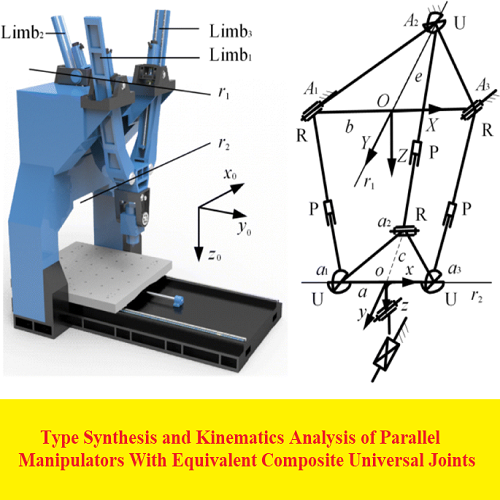
Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints
Yang Lu, Yi Lu1, Canguo Zhang and Nijia Ye
و المحتوى كما يلي :
Abstract
Several novel parallel manipulators (PMs) with equivalent composite universal joints Ue are synthesized and their kinematics is studied systematically in this paper. First, the 12 novel PMs with Ue are synthesized, and their degrees of freedom are calculated. Second, the
structure and merits of the composite limb with Ue for constructing the PMs with Ue are analyzed; the unified formulas are derived for
solving the sub-Jacobian matrix, the sub-Hessian matrix, the angular velocity and the angular acceleration of the composite limb with Ue.
Third, the formulas are derived for solving the Jacobian matrix and output velocity, the Hessian matrix and output acceleration of the
moving platforms of the 10 novel PMs with Ue. Finally, a 5-DoF PM with 2Ue in the 12 synthesized PMs with Ue is illustrated for solving the kinematics of the PMs with Ue; its reachable workspace is constructed for representing merits of the PMs with Ue. The theoretical
kinematics solutions are verified by the simulation solution of the simulation mechanism of the 5-DoF PM with 2Ue.
Keywords: Parallel manipulator; Composite universal joint; Composite limb; Kinematics; Dynamics
Conclusions
The 12 novel parallel manipulators with equivalent composite universal joints Ue are synthesized and their DoFs are calculated. They have merits as follows: Ue can be manufactured
more easily than that of composite spherical joints Sc; the
workspace can be increased by Ue; the number of spherical
joint can be reduced by Ue; the capability of load bearing can
be increased; the more room of the moving platform for installing fingers or tools can be provided by using Ue.
Fig. 4. Kinematics solutions of 5-DoF PM5 with 2Ue .
Fig. 5. Prototype of hybrid hand with three fingers.Y. Lu et al. / Journal of Mechanical Science and Technology 33 (11) (2019) 5473~5482 5481
A prototype of a hybrid hand formed the 4-DoF parallel
manipulator with 1Ue and three fingers attached on to the
moving platform is developed. A object is gripped using the
prototype of the hybrid hand.
The 1×6 sub-Jacobian matrix and the 6×6 sub-Hessian matrix of the composited kinematic limb with Ue are derived. The
formulas for solving angular velocity and angular acceleration
of the composited kinematic limb with Ue are derived. The
kinematics of the 10 novel parallel manipulators with Ue are
analyzed. Their unified kinematic 6×6 Jacobian matrix and the
unified 6 layers (6×6) Hessian matrix are derived. The derived
kinematics formulas provide the theoretical foundations for
manufacturing of the parallel manipulators with Ue.
The kinematics theoretical solutions of the 5-DoF parallel
manipulator with 2Ue are verified by its simulation mechanism. It has a large symmetry reachable workspace.
The reachable workspace of the 5-DoF parallel manipulator
with 2U
e is constructed, which is similar to that of the 5-DoF
4SPS+SPR parallel manipulator with 2Sc.
The synthesized 12 novel parallel manipulators with Ue
have some potential applications for the parallel machine tools,
the surgical manipulator, the tunnel borer, the barbette of war
ship, the rescuing robots, human health robot, and the satellite
surveillance platform.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints
رابط مباشر لتنزيل بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints 
|
|
morhaf92
مهندس تحت الاختبار

عدد المساهمات : 2
التقييم : 2
تاريخ التسجيل : 08/10/2014
العمر : 32
الدولة : سوريا
العمل : مدير مبيعات قطع تبديل الآلات
الجامعة : جامعة حلب
| | موضوع: رد: بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints السبت 11 سبتمبر 2021, 6:15 pm | |
| |
|
Admin
مدير المنتدى
عدد المساهمات : 18996
التقييم : 35494
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
| | موضوع: رد: بحث بعنوان Type Synthesis and Kinematics Analysis of Parallel Manipulators With Equivalent Composite Universal Joints الخميس 16 سبتمبر 2021, 10:36 pm | |
|
- morhaf92 كتب:
جزاكم الله كل خير جزانا الله وإياك خيراً
لاتنسى المساهمة معنا بعمل اللايك والشير للمنشورات والفيديوهات والإشتراك فى القناة
https://www.youtube.com/c/Eng2010?sub_confirmation=1
وزيارة الموقع
https://www.eng2010.com
والاعجاب بصفحة المنتدى على الفيس بوك
https://www.facebook.com/engineer2010
وجروب المنتدى على الفيس بوك
https://www.facebook.com/groups/DEABS2010/
و جروب المنتدى على الواتساب - نرجو الانضمام لجروب واحد فقط
https://chat.whatsapp.com/F7y6ThYOR2gEkSK7KtnhKx
https://chat.whatsapp.com/Dv2QvTOLGp47OaVi5UB2sT
https://chat.whatsapp.com/IC43ZxT5MzWI9ysZLMWlbx
و قناتنا على التيليجرام
https://t.me/Eng2010Com
https://t.me/Eng2010
و متابعة حسابنا على موقع تويتر
https://twitter.com/Eng2010com |
|











