Admin
مدير المنتدى


عدد المساهمات : 18992
التقييم : 35482
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Constraint and Mobility Change Analysis of Rubik’s Cube-inspired Reconfigurable Joints and Corresponding Parallel Mechanisms الجمعة 12 نوفمبر 2021, 1:56 pm موضوع: بحث بعنوان Constraint and Mobility Change Analysis of Rubik’s Cube-inspired Reconfigurable Joints and Corresponding Parallel Mechanisms الجمعة 12 نوفمبر 2021, 1:56 pm | |
| 
أخواني في الله
أحضرت لكم
بحث بعنوان
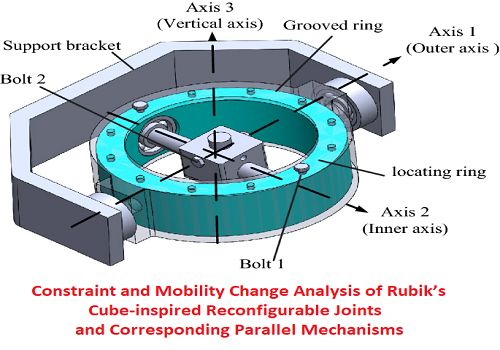
Constraint and Mobility Change Analysis of Rubik’s Cube-inspired Reconfigurable Joints and Corresponding Parallel Mechanisms
Duanling Li , Pu Jia , Jiazhou Li , Dan Zhang and Xianwen Kong
و المحتوى كما يلي :
Abstract
The current research of reconfigurable parallel mechanism mainly focuses on the construction of reconfigurable
joints. Compared with the method of changing the mobility by physical locking joints, the geometric constraint has
good controllability, and the constructed parallel mechanism has more configurations and wider application range.
This paper presents a reconfigurable axis (rA) joint inspired and evolved from Rubik’s Cubes, which have a unique
feature of geometric and physical constraint of axes of joint. The effectiveness of the rA joint in the construction of
the limb is analyzed, resulting in a change in mobility and topology of the parallel mechanism. The rA joint makes the
angle among the three axes inside the groove changed arbitrarily. This change in mobility is completed by the case
illustrated by a 3(rA)P(rA) reconfigurable parallel mechanism having variable mobility from 1 to 6 and having various
special configurations including pure translations, pure rotations. The underlying principle of the metamorphosis of
this rA joint is shown by investigating the dependence of the corresponding screw system comprising of line vectors,
leading to evolution of the rA joint from two types of spherical joints to three types of variable Hooke joints and one
revolute joint. The reconfigurable parallel mechanism alters its topology by rotating or locking the axis of rA joint to
turn all limbs into different phases. The prototype of reconfigurable parallel mechanism is manufactured and all configurations are enumerated to verify the validity of the theoretical method by physical experiments.
Keywords: Reciprocal screws, Reconfigurable-axis (rA) joint, Metamorphic parallel mechanism, Constraint analysis
Conclusions
1. This paper presents a newly reconfigurable Axes joint
inspired by the Rubik’s Cube for the construction of
metamorphic parallel mechanisms with the ability
of mobility change. This rA joint is designed by two
constraint methods of geometric and physical locking, and its six equivalent motion phases and corresponding mobility are analyzed.
2. Seven kinds of metamorphic parallel mechanisms are
selected as representatives, and their constraints and
mobility are analyzed. The degree of freedom of these
seven metamorphic parallel mechanisms can vary
from 6 to 1. The biggest advantage of this 3(rA)P(rA)
parallel mechanism is that the configuration of the
rA joint can be adjusted to change the configuration
of the parallel mechanism without disassembling the
structure.
3. According to the analysis of the screw system of the
variable limbs and parallel mechanisms, 36 kinds of
limb phases and 51 kinds of parallel mechanism configurations are enumerated respectively.
4. The mobility of the selected configuration is verified
by the prototype, which is consistent with the previous theoretical analysis.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Constraint and Mobility Change Analysis of Rubik’s Cube-inspired Reconfigurable Joints and Corresponding Parallel Mechanisms
رابط مباشر لتنزيل بحث بعنوان Constraint and Mobility Change Analysis of Rubik’s Cube-inspired Reconfigurable Joints and Corresponding Parallel Mechanisms 
|
|











